PID (Proportional Integral Derivative) Controller
WHAT IS PID CONTROLLER
It is an acronym that stands for proportional-integral-derivative controller.
If you need to keep something constant. Like a temperature for example then this is the way to do it.

Essentially it uses a control loop feedback, To ensure the output you will get.
Simply you put a setting in the controller.
And it will keep the output constant based on the feedback from same input.


When would you use a PID controller?
A PID controller is an instrument used in industrial control applications to regulate temperature, flow, pressure, speed and other process variables.
How many types of PID controllers are there?
There are three basic types of controllers:
i) on-off,
ii) proportional
iii) PID
Depending upon the system to be controlled, the operator will be able to use one type or another to control the process.
PID Controller on Ships
Application of the proportional-Integral-Derivative (PID) control is the water level control system for boiler on Ships, Which maintains desired water level always without offset.
Other Areas
A PID controller is an instrument used in Industrial Control applications to regulate temperature, flow, pressure, speed and other process variables.
PID (Proportional-Integral-Controllers use a control Loop feedback Mechanism to control process variables and are the most accurate and stable controller.
Tuning PID
PID tuning is the process of finding the values of proportional, integral, and derivative gains of a PID controller to achieve desired performance and meet design requirements.
Troubleshoot-
When a control loop is not responding properly check the tuning first The response to controller out and apply a systematic tuning method such as LAMBDA tuning. If this does not solve the loop problem, it will always show you where to look for the root cause.
The root cause may be found in the mechanical components, electrical components, electrical components, software parameters, or configuration. Reference also must be made to makers instructions manual too.
What is LAMBDA TUNING OF PID CONTROLLER?
LAMBDA tuning a PID controller explained!
The LAMBDA tuning method provides the ability to tune the PID controllers in a process system to achieve process performance goals regardless of the loop requirements. The LAMBDA tuning method can be used for all of the common complex dynamics that were listed in the introduction.

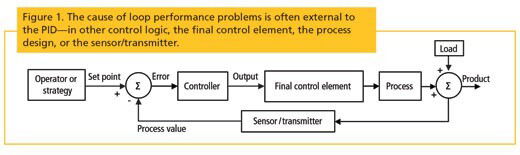
Figure 1 shows a typical process control feedback loop in block diagram format. An operator or a control strategy determines the set point (SP), which is compared to the process value (PV) in the controller to calculate the error.
The controller then adjusts its output to the final control element to vary the process.
The change in the process is detected by the sensor and transmitted as the PV to the controller.
What does tuning a PID controller mean?
The art of tuning a PID loop is to have it adjust its output (OP) to move the process variable (PV) as quickly as possible to the set point (responsive), minimize overshoot, and then hold the variable steady at the set point without excessive OP changes (stable).
Why do we need PID tuning?
The main objective in tuning PID controllers is to adjust the reactions of PID controllers to set point changes and unmeasured disturbances such that variability of control error is minimized. PID controllers are implemented primarily for the purpose of holding measured process value at a set point, or desired value.

How can I improve my PID control?
- Increased Loop Rate. One of the first options to improve the performance of your PID controllers is to increase the loop rate at which they perform. ...
- Gain Scheduling. ...
- Adaptive PID. ...
- Analytical PID. ...
- Optimal Controllers. ...
- Model Predictive Control. ...
- Hierarchical Controllers.

What happens if a PID controller is not properly tuned?
If robust PID control can increase productivity, then poor PID control can decrease productivity.
If a well-tuned system helps equipment run longer and safer, then a poorly tuned system may increased failure frequency and safety incidents.
What is the purpose of tuning a controller?
Controller tuning is the process of determining the controller parameters which produce the desired output.
Controller tuning allows for optimization of a process and minimizes the error between the variable of the process and its set point.
Why PID controller is better?
In PID controller there is a minor decrease or no changes are shown in various parameter which can see from table 1 and table 2. Hence there is no change in steady state error so PID controller is better than P and PID controller.
How long is PID tuning?
Suppose the Delay time is 4 minutes, than the PID Tuner requires 20 minutes for tuning. With the other methods it is likely that you need at least 160 minutes. Hence, as soon as the Delay time is more than a couple of minutes, the other tuning methods take a 'long' time (at least hours).
How long does PID autotune take?
PID auto tuning takes more than 4 hours.
How does auto tuning work?
Auto-Tune users set a reference point – a scale or specific notes, for example – and a rate at which derivations from this point will be digitally corrected.
This rate can be carefully calibrated so a voice sounds "natural," by tacking the voice smoothly back to the reference pitch.
TROUBLESHOOT
How do you fix PID oscillation?
The PID controller is not stable, or oscillating:
Start by decreasing the derivative gain to a low setting (to ensure it is not causing the instability), then decrease the proportional gain until the controller becomes more stable.
How do you stop PID from overshooting?
If you set a very low gain, you can prevent the overshoot, but it may take a long time to reach your setpoint.
Start with the integral time, derivative time, and proportional gain all at zero. Increase the proportional gain value in small increments until oscillations occur, and then reduce the setting.
Which of the following is PID tuning method?
In broad terms, there are three PID tuning methods for determining the optimal combination of these settings: heuristic tuning, rule-based tuning, and model-based tuning. Each method has its pros and cons.
How do you calculate PID to tuning parameters?
The change in the measured variable is equal to 1.0 meter (i.e. ~3.0 meters - ~2.0 meters = 1.0 meter). The change in controller output is equal to 10% (i.e. 60% - 50% = 10%).
Process Gain can then be computed as 0.1 meters/percent. Process Gain is based on the same unit values that are used in the process.
What causes PID oscillation?
Whether you are talking about a liquid level, composition, pH, or temperature or a gas pressure, decreasing the gain can cause slow oscillations. These are important loops.
Thinking reducing gain will always reduce oscillations, a person seeing the oscillations decreases the gain making the matter worse.
How can PID controller reduce overshoot?
If you set a very low gain, you can prevent the overshoot, but it may take a long time to reach your setpoint. Start with the integral time, derivative time, and proportional gain all at zero. Increase the proportional gain value in small increments until oscillations occur, and then reduce the setting.
What happens if a PID controller is not properly tuned?
If robust PID control can increase productivity, then poor PID control can decrease productivity.
If a well-tuned system helps equipment run longer and safer, then a poorly tuned system may increased failure frequency and safety incidents.
What is the purpose of tuning a controller?
Controller tuning is the process of determining the controller parameters which produce the desired output. Controller tuning allows for optimization of a process and minimizes the error between the variable of the process and its set point.
Why PID controller is better?
In PID controller there is a minor decrease or no changes are shown in various parameter which can see from table 1 and table 2. Hence there is no change in steady state error so PID controller is better than P and PID controller.
What are disadvantages of PID controller?
It is well-known that PID controllers show poor control performances for an integrating process and a large time delay process. Moreover, it cannot incorporate ramp-type set-point change or slow disturbance. We discuss the above-mentioned limitations of the PID controller.
Which is better PI or PD?
In terms of speed, PID controller has the fastest response as it shows the fastest time constant of 0.17s and settling time compared to the PD and PI Controllers, however in terms of Damping the PD controller has the best performance because no overshoot was observed at steady state compared to the PI and PID ..
When would you use a PID controller?
A PID controller is an instrument used in industrial control applications to regulate temperature, flow, pressure, speed and other process variables.
What is the output of a PID controller?
Output. The PID controller output is calculated by simply adding the Proportional, the Integral and the Derivative. Depending on the gain setting of these three values, will determine how much effect they will have on the output. PID Controller Output Math: Output = P + It + D.
What happens if derivative gain is too high?
Large derivative action tends to destabilize a loop because it doesn't allow it to change.
The rule of thumb is that if your derivative time is greater than the reset time of your controller, you've got issues.
That should never, ever occur.”
What happens if derivative gain is too high?Large derivative action tends to destabilize a loop because it doesn't allow it to change.
The rule of thumb is that if your derivative time is greater than the reset time of your controller, you've got issues. That should never, ever occur.”
Are PID controllers still used?
Proportional-Integral-Derivative (PID) controllers are used in most automatic process control applications in industry today to regulate flow, temperature, pressure, level, and many other industrial process variables.
Why PID controller is not used?
Because of the use of derivative control, PID control cannot be used in processes where there is a lot of noise, since the noise would interfere with the predictive, feed forward aspect. However, PID control is used when the process requires no offset and a fast response time.
Which is the best PID controller?
Autonics. Autonics Analog or Digital PID temperature controllers, offer fast setup and gives the exact temperature administration and control for an assortment of uses while offering a better value, plain and simple operation.

Is PID controller analog or digital?
Most proportional-integral-derivative (PID) applications use digital controllers, though some still use analog.
Digital control can offer additional process control system efficiencies. Digital controllers have some advantages over analog controllers for proportional-integral-derivative (PID) applications.
How do you speed up a PID loop?
To tune a PID use the following steps:
- Set all gains to zero.
- Increase the P gain until the response to a disturbance is steady oscillation.
- Increase the D gain until the the oscillations go away (i.e. it's critically damped).
- Repeat steps 2 and 3 until increasing the D gain does not stop the oscillations.
- To tune a PID use the following steps:
- Set all gains to zero.
- Increase the P gain until the response to a disturbance is steady oscillation.
- Increase the D gain until the the oscillations go away (i.e. it's critically damped).
- Repeat steps 2 and 3 until increasing the D gain does not stop the oscillations.
- Set P and D to the last stable values.
- Increase the I gain until it brings you to the setpoint with the number of oscillations desired (normally zero but a quicker response can be had if you don't mind a couple oscillations of overshoot)
What is gain in PID?
Often PID controllers involve terminology that is unique within controls. The three gains, proportional, integral, and differential, are called modes and PID is referred to as three-mode control. Error is sometimes called offset. The integral gain is called reset and the differential gain is often called rate.
- A question targeted at a more specific question would be more useful. Otherwise, you should just look at the PID article, with a section on tuning–ronalchn Oct 26, 2012 at 21:07
- I've always found tuning PIDs to be very dependent on the characteristics of the system, which is why I've never found auto-tune systems to be terribly useful.
- They are fine for a first pass, low performance set of parameters, but they are far from optimal, and you will have the same problem with any general strategy which is not optimised for the mechanical, electrical and control aspects of a given system
For small, low torque motors with little or no gearing, one procedure you can use to get a good baseline tune is to probe it's response to a disturbance. To tune a PID use the following steps:
- Set all gains to zero.
- Increase the P gain until the response to a disturbance is steady oscillation.
- Increase the D gain until the the oscillations go away (i.e. it's critically damped).
- Repeat steps 2 and 3 until increasing the D gain does not stop the oscillations.
- Set P and D to the last stable values.
- Increase the I gain until it brings you to the setpoint with the number of oscillations desired (normally zero but a quicker response can be had if you don't mind a couple oscillations of overshoot)
What disturbance you use depends on the mechanism the controller is attached to. Normally moving the mechanism by hand away from the setpoint and letting go is enough. If the oscillations grow bigger and bigger then you need to reduce the P gain. If you set the D gain too high the system will begin to chatter (vibrate at a higher frequency than the P gain oscillations). If this happens, reduce the D gain until it stops. I believe this technique has a name. I'll put it here when I find it.
How does the Ziegler Nichols tuning method work?
A popular method for tuning P, PI, and PID controllers is the Ziegler–Nichols method. This method starts by zeroing the integral and differential gains and then raising the proportional gain until the system is unstable.
The value of KP at the point of instability is called KMAX; the frequency of oscillation is f0.

What is KP in PID controller?
The transfer function of the PID controller looks like the following: Kp = Proportional gain. KI = Integral gain. Kd = Derivative gain.

Who invented PID control?
In 1911, the businessman and inventor Elmer Sperry created the PID control (Proportional – Integral – Derivative), which combines these three actions.
Sperry designed this controller for the United States Navy.
. 
What are the different tuning methods of controller?
Types of controller tuning methods include the trial and error method, and process reaction curve methods.
The most common classical controller tuning methods are the Ziegler-Nichols and Cohen-Coon methods. These methods are often used when the mathematical model of the system is not available.

What causes valve hysteresis?
When related to a valve, hysteresis is the difference between the valve position on the upstroke and its position on the down stroke at any given input signal. For it to be true hysteresis the valve will be moving at all times.
Hysteresis is most often caused by a high degree of static friction within the valve.

Why do control valves fail?
Four common failures associated with control valves are found at a high frequency in poorly performing control loops.
These are Dead band, Stiction, Positioner overshoot, Incorrect valve sizing and Nonlinear flow characteristic.
What is the difference between deadband and hysteresis?
Deadband is the range in a process where no changes to output are made.
Hysteresis is the difference in a variable depending on the direction of travel.

What is hysteresis in simple terms?
As a general term, hysteresis means a lag between input and output in a system upon a change in direction.
Hysteresis is something that happens with magnetic materials so that, if a varying magnetizing signal is applied, the resulting magnetism that is created follows the applied signal, but with a delay.
What are the benefits of using hysteresis in on off control?
ON or OFF.
Hysteresis prevents the output from “chattering” or making fast, continual switches if the cycling above and below the set point occurs rapidly.
Disadvantages: - They are either 100% ON or OFF regardless of where the reading is with respect to the set point.
What is the purpose of PID in the main engine cooling system?The P, I & D
For temperature controller PID, the optimal variable is maintaining the process temperature at the setpoint for the desired period of time, avoiding any severe changes from lag, overshoot or disturbances.
The three elements of the PID algorithm are the Proportional, the Integral, and the Derivative.
What are the advantages of PID controller?
Advantages of PID Controller
a) Improving the stability of the system.
b) Reduces the steady-state error.
c) Feasible and easy to implement.
d) Makes the system faster by reducing the time constant.
(This article is for Educational and Learning purpose only)